
Keio University, Takahashi Lab.
Last updated: Nov. 21, 2022
Task and Motion Planning for Service Robot using World state-Dependent Action Graph
Member
- Masaki Takahashi, Professor, Keio University
Link
Abstract
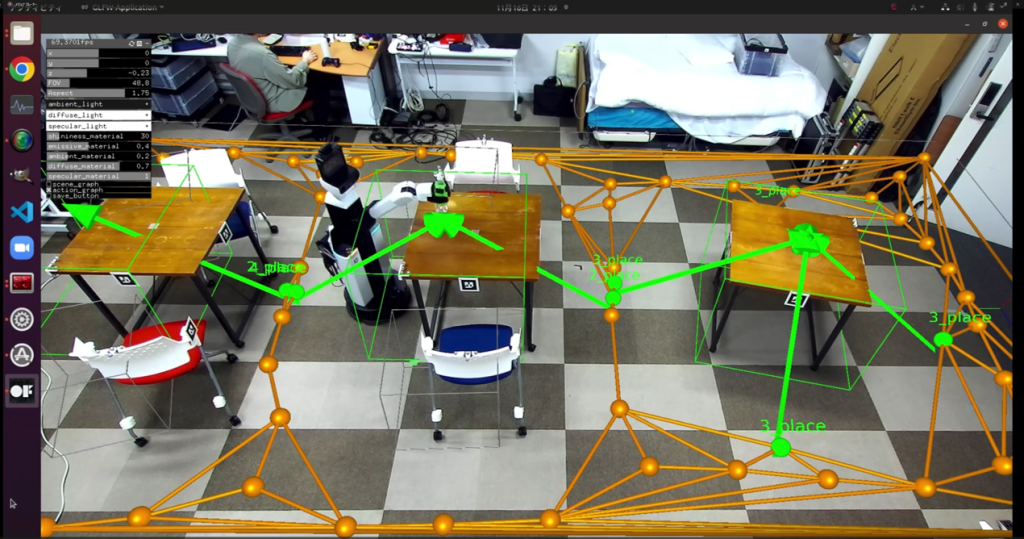
The tasks for social robots include mobile manipulation tasks instructed by humans, such as tidying up and carrying. Mobile manipulation planner to exploit the robot’s functions requires understanding the feasible actions in real space depending on the robot’s subsystem configuration and the object placement in the environment. This study aims to realize the planning of mobile manipulation considering the world state, which consists of the robot state (subsystem configuration and their state) for exploiting the robot’s functions. In this paper, we first propose an environmental representation called a world state-dependent action graph (WDAG). In the WDAG, the spatial and temporal order of feasible actions is represented based on the world state by adopting the knowledge representation with scene graphs and a recursive multilayered graph structure. We also propose a planning method of mobile manipulation using WDAG. Planner based on the exhaustive understanding of the spatial and temporal connections of actions enables to derivation of many effective action sequences to accomplish the task. The effectiveness of the proposed method was evaluated through actual machine experiments in a coffee shop environment.

Reference
- Yosuke Kawasaki, Shunsuke Mochizuki, Masaki Takahashi, ASTRON: Action-based Spatio-Temporal Robot Navigation, IEEE Access, (2021-10), DOI: 10.1109/ACCESS.2021.3120216.
- ShunsukeMochizuki, Yosuke Kawasaki, Masaki Takahashi, “ProTAMP: Probabilistic Task and Motion Planning Considering Human Action for Harmonious Collaboration”, The 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2022), Kyoto, 2022.
- Yosuke Kawasaki, Masaki Takahashi, “Spatio-Temporal Action Order Representation for Mobile Manipulation Planning”, 31st IEEE International Conference on Robot & Human Interactive Communication (IEEE RO-MAN 2022) , Napoli,2022.
- Yosuke Kawasaki, Masaki Takahashi, “World state-Dependent Action Graph: a representation of action possibility and its variations in real space based on world state”, 19th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2022) , Lisbon, 2022.