
National Institute of Informatics, Inamura Lab.
Last updated: Jul. 30, 2022
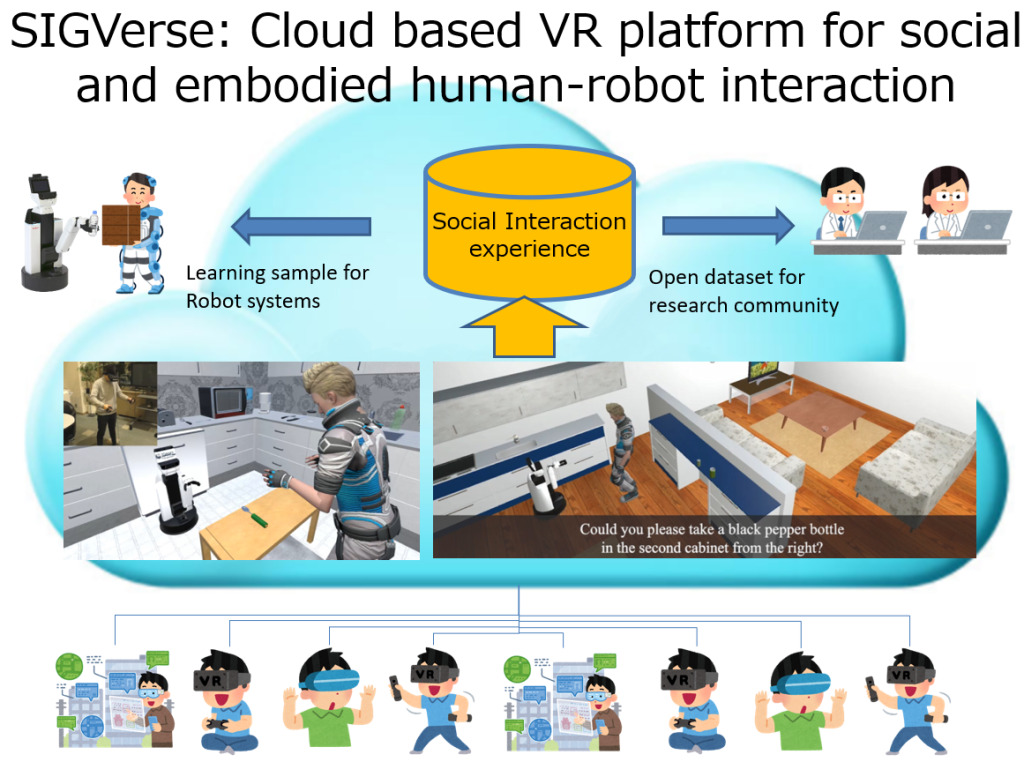
A cloud-based VR platform for social and embodied human-robot interaction: SIGVerse
Member
- Tetsunari Inamura, Associate Professor, National Institute of Informatics
- Hiroki Yamada, Project Researcher, National Institute of Informatics
Link
- SIGVerse: http://www.sigverse.org/wiki/en
- RoboCup@Home Simulation: https://sites.google.com/view/robocup-athome-sim/home
Overview of the SIGVerse
Research on Human-Robot Interaction (HRI) requires the substantial consideration of an experimental design, as well as a significant amount of time to practice the subject experiment. Recent technology in virtual reality (VR) can potentially address these time and effort challenges. The significant advantages of VR systems for HRI are: 1) cost reduction, as experimental facilities are not required in a real environment; 2) provision of the same environmental and embodied interaction conditions to test subjects; 3) visualization of arbitrary information and situations that cannot occur in reality, such as playback of past experiences, and 4) ease of access to an immersive and natural interface for robot/avatar teleoperations. Although VR tools with their features have been applied and developed in previous HRI research, all-encompassing tools or frameworks remain unavailable. In particular, the benefits of integration with cloud computing have not been comprehensively considered. Hence, the purpose of this study is to propose a research platform that can comprehensively provide the elements required for HRI research by integrating VR and cloud technologies. To realize a flexible and reusable system, we developed a real-time bridging mechanism between the robot operating system (ROS) and Unity. To confirm the feasibility of the system in a practical HRI scenario, we applied the proposed system to three case studies, including a robot competition named RoboCup@Home. via these case studies, we validated the system’s usefulness and its potential for the development and evaluation of social intelligence via multimodal HRI.

Reference
- T. Inamura and M. Yoshiaki. 2021. “SIGVerse: A Cloud-Based VR Platform for Research on Multimodal Human-Robot Interaction.” Frontiers in Robotics and AI 8 (May): doi: 10.3389/frobt.2021.549360. [Link]