Osaka University, Hirata Lab.
Last updated: Nov. 21, 2022
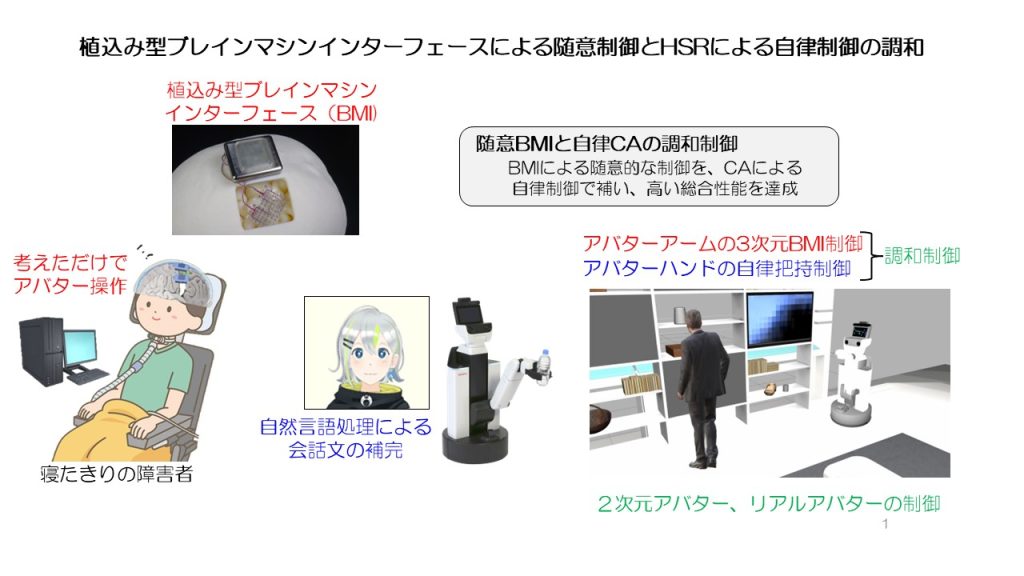
Harmonization between voluntary control by implantable BMI and autonomous control by HSR
Member
- Masayuki Hirata, Professor, Osaka University
- Takeru Kuratomi, Osaka University
- Misa Taguchi, Osaka University
- Shohei Yoshida, Osaka University
- Takayuki Nagai, Osaka University
- Tomoka Muraoka, Osaka University
- Tatsuya Aoki, Osaka University
- Misato Kasuya, Osaka University
Link
- Contents: https://www.med.osaka-u.ac.jp/pub/ndr/
Abstract
Avatar robots will contribute to supporting the independent life of disabled people and to reducing the burden of nursing care, if they can act as disabled people want just by thinking. This is our final goal. We focus on harmonization between voluntary control by implantable brain-machine interface (implantable BMI) and autonomous control by HSR in collaboration with Professor Takayuki Nagai from Osaka University. BMI is suitable for controlling avatars directly and arbitrarily just by thinking, but it is not easy to accurately control as required for practical operation. On the other hand, avatars can recognize the environment and act autonomously, but it is not easy to act exactly as required. Therefore, in this research, we aim to realize natural and robust high operability by complementarly harmonizing voluntary control by BMI and autonomous control of avatars. We aim to achieve practical performance by using the mobile manipulator HSR, which has all upper limb functions, lower limb functions, and conversation functions as an avatar. We plan to conduct a clinical trial of implantable BMI in severely-disabled patients with amyotrophic lateral sclerosis (ALS). In this study, we will develop a technology that allows ALS patients with implantable BMI who participated in this trial to remotely operate HSR by harmonized control of BMI and avatar to enable social activities with people outdoors.