
Ritsumeikan Univ, Emergent Systems Lab.
Last updated: Nov. 21, 2022
Development of a knowledge transfer system among robots based on a multimodal concept acquisition model
Member
- Yoshinobu Hagiwara, Associate Professor, Ritsumeikan University
- Tadahiro Taniguchi, Professor, Ritsumaikan University
- Akira Taniguchi, Lecturer, Ritsumikan University
- Takahiro Fukumori, Lecturer, Ritsumeikan University
- Lotfi El Hafi, Assistant Professor, Ritsumeikan University
- Tadashi Matsuo, Assistant Professor, Ritsumeikan University
- Shoichi Hasegawa, Ph.D. Student, Ritsumeikan University
- Masaki Ito, Student, Ritsumeikan University
Link
- Emergent systems laboratory: http://www.em.ci.ritsumei.ac.jp/
- Team Rits: https://emlab.jimdofree.com/
- Team OIT-RITS: https://sites.google.com/em.ci.ritsumei.ac.jp/oit-rits-wrs2020
- YouTube (OIT-RITS): https://www.youtube.com/channel/UCTjH3Y5_jIbclJeN8S4hs6Q
- GitHub: https://github.com/EmergentSystemLabStudent
Abstract
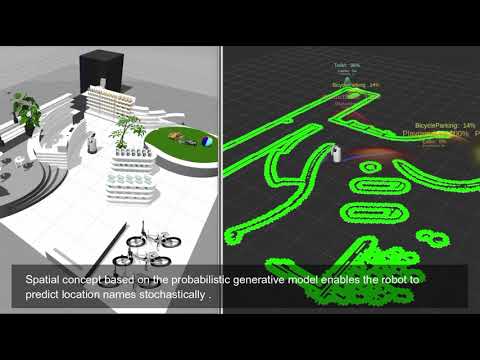
To achieve object goal navigation and other tasks, it is desirable for the robot to efficiently acquire the knowledge of objects and places from a small amount of data in a novel home environment. We develop a system that transfers the knowledge of objects and places acquired in home environments between robots. The knowledge transfer system is developed by extending a probabilistic generative model that forms the concepts of objects and places based on multimodal information to multi-agent systems. The developed model will be implemented in a distributed manner on multiple networked robots (HSR) to form a knowledge transfer system.
Reference
- Y. Hagiwara, K. Taguchi, S. Ishibushi, A. Taniguchi & T. Taniguchi, “Hierarchical Bayesian model for the transfer of knowledge on spatial concepts based on multimodal information”, Advanced Robotics, Vol. 36, Issue 1-2, pp. 33-53, 25 Nov. 2021.
- A. Taniguchi, S. Isobe, L. El Hafi, Y. Hagiwara & T. Taniguchi, “Autonomous planning based on spatial concepts to tidy up home environments with service robots”, Advanced Robotics, Vol. 35, Issue 8, pp. 471-489, 22 Feb. 2021.
- L. El Hafi, S. Isobe, Y. Tabuchi, Y. Katsumata, H. Nakamura, T. Fukui, T. Matsuo, G. A. Garcia Ricardez, M. Yamamoto, A. Taniguchi, Y. Hagiwara, and T. Taniguchi, “System for Augmented Human-Robot Interaction Through Mixed Reality and Robot Training by Non-Experts in Customer Service Environments”, Advanced Robotics, Vol. 34, No. 3, pp. 1-16, Nov. 2019.
- T. Taniguchi, D. Mochihashi, T. Nagai, S. Uchida, N. Inoue, T. Nakamura, Y. Hagiwara, N. Iwahashi, T. Inamura, “Survey on frontiers of language and robotics”, Advanced Robotics, Vol. 33, No. 15-16, pp. 700-730, Jan. 2019.